Virtual Display and Simulation
HSR-Studio workstation software is a computer virtual debugging software that integrates teaching programming, offline programming, motion simulation, and control system full parameter debugging and management.
Based on multiple core technologies, the software realizes the separation of the control layer, algorithm layer, and view layer of the software, meets the requirements of openness, modularization, and scalability, and deeply integrates the Huasu III control system. It can realize robot teaching programming, online debugging, acquisition analysis and other tasks, and has model analysis, feature selection, path planning, collision detection, beat simulation, and virtual debugging functions. The functions cover the complete life cycle of robot integrated applications, including solution design, scene construction, offline programming, virtual debugging, and deployment delivery, improving product design quality and reducing design costs, thereby accelerating the production line deployment and debugging cycle.
HSR-Studio workstation software features
-
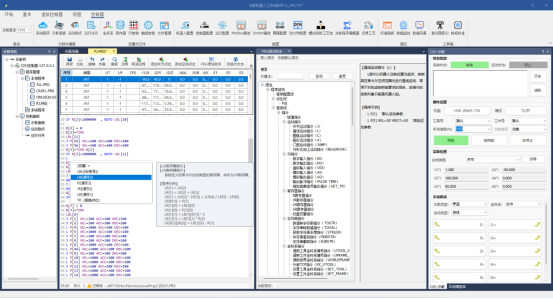
Program editor
The software supports offline program editing, provides efficient programming tools such as code auto-completion, syntax error checking, and PRG syntax assistant to help users quickly familiarize themselves with and write programs. At the same time, the software supports program synchronization, and one-click distribution or upload of programs.
-
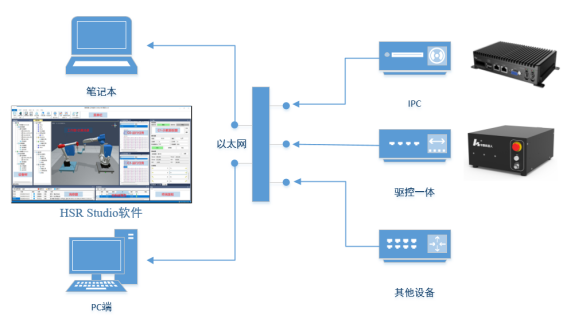
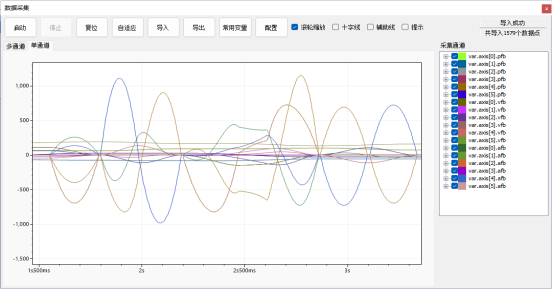
Online debugging
The software supports connecting and communicating with the controller and integrated drive control device, online monitoring and debugging of the robot, real-time monitoring of variables and program operation, data acquisition, system file backup and recovery, etc., which facilitates users to conduct online debugging.
-
Virtual controller
The software integrates Huasu’s three-type virtual controller, which is independently compiled and run based on PC after being separated from the real hardware, so that some programming and debugging tasks of users can be carried out smoothly on PC, shortening the time and cost of on-site debugging and deployment.
-
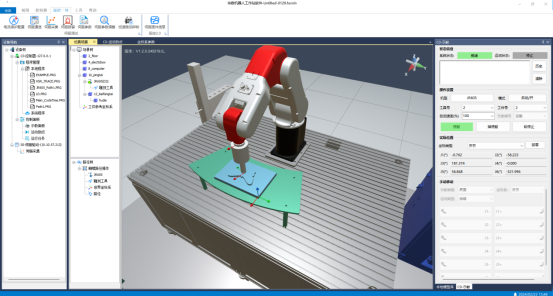
Scene construction and simulation
The software model library supports the import of models in formats such as stl, stp, step, etc., supports the construction of simulation scenes, and binds devices and robots for action simulation, estimates the motion beat time, and detects the collision and interference between robots and scenes.
-
Automatic path planning
The software supports automatic path planning by selecting the features of models in formats such as stp and step, and supports a series of functions such as batch setting of attributes of path points, batch adjustment of coordinates, and position directional offset. It can visualize and efficiently check and adjust points in three-dimensional scenes, greatly improving programming efficiency.
-
Integrated visual toolkit
The software integrates the visual toolkit, uses a graphical interface to build the visual process, and embeds a variety of self-developed algorithms. Through simple configuration, the robot communication configuration and workstation can be completed, which enhances the versatility of the visual toolkit and reduces the learning difficulty.
-
Continuous technical support
Genuine software, with completely domestically produced independent intellectual property rights, can provide continuous technical support.




Related Products
Contact Information
- China Special Aircraft Research Institute,West tower,Av.Guanggu 50, East-Lake High Tech Development Zone,Wuhan,Hubei,P.R.China

{kind=link}
{kind=link}