AML Series Robotic Workstation
For production-line scale flexible automatic loading and unloading requirements.
![]() Number of Axes:6
Number of Axes:6
![]() Payload:12kg/16Kg
Payload:12kg/16Kg
![]() Arm Span:1155~1455mm
Arm Span:1155~1455mm
Loading and Unloading Robotic Workstation AML Series Introduction
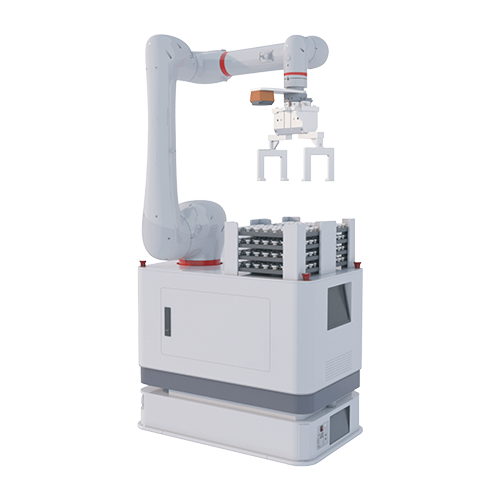
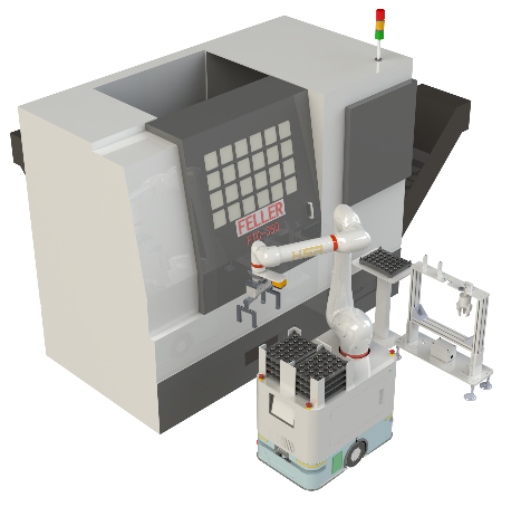
The AML series robotic workstation comprises composite robots designed to interface with machine tools, inspection equipment, and other automated devices. These robots transport workpieces or trays with a maximum end load capacity of 16 kg, making them suitable for supplying materials to workshop-level production lines. Capable of autonomous positioning and navigation, they operate safely within factory environments and independently perform tasks such as automatic loading/unloading of production lines, tool changing, inspection, and collaborative assembly. Additionally, they can coordinate with other equipment to execute complex operations and integrate with the factory’s MES (Manufacturing Execution System) to enable intelligent scheduling of production lines and workshops.
The composite robot system consists of an AGV chassis, a collaborative robot, a camera module, end effectors, and a control cabinet. It enables autonomous navigation via the AGV, visual recognition of workpiece positions, and material handling through the robotic manipulator. By integrating advanced algorithms for on-site scheduling, visual recognition and positioning, and robotic motion control—together with intelligent obstacle avoidance, alarm triggering, and error resolution functionalities—the system achieves smart material transfer and flow across various scenarios. It is widely used in applications such as CNC machine loading/unloading, semiconductor material handling, and laboratory reagent transport.
Loading and Unloading Robotic Workstation Parameter
| AML Series Automatic Machine Loading Equipment | |||||
| No. | Item | Unit | AML-X12-400 | AML-X16-400 | |
| 1 | Cobot | Number of Axes | / | 6 | 6 |
| 2 | Load Capacity | kg | 12 | 16 | |
| 3 | Range of Motion | mm | 1455 | 1155 | |
| 4 | Accuracy | mm | ±0.03 | ±0.04 | |
| 5 | Autonomous Mobile Robot (AMR) Platform | Payload | kg | 400 | |
| 6 | Dimensions (L*W) | mm | 841mm*540mm | ||
| 7 | Positioning Accuracy | mm | ±10 | ||
| 8 | Navigation Method | Laser SLAM + Vision + IMU | |||
| 9 | Motion Performance | Maximum Speed | m/s | 1.2 | |
| 10 | Rotation Speed | °/s | 180 | ||
| 11 | Gradeability | ° | ≤5 | ||
| 12 | Max. Gap Crossing Width | mm | ≤30 | ||
| 13 | Max. Step Climbing Height | mm | ≤10 | ||
| 14 | Turning Diameter | mm | 942 | ||
| 15 | Drive Method | / | Differential Drive | ||
| 16 | Power Module | Battery Specification | / | 48V 60Ah LiFePO₄ (LFP) Battery Pack | |
| 17 | Charging Time | h | 2 | ||
| 18 | Operation Time | h | 8 | ||
| 19 | Safety System | Safety Mechanisms | / | Navigation Laser + Full-wrap Bumpers + Rear Laser (Optional) + Depth Camera (Optional) + E-stop Buttons × 2 + Audio-visual Indicator | |
| 20 | Communication Module | Communication Module | / | ModBus-RTU、ModBus-TCP | |
| 21 | I/O Interface | / | input 2 / output 2 | ||
| 22 | Auto-docking Charging Station | Input Voltage | V | 200~250 AC (50Hz~60Hz) | |
| 23 | Nominal Voltage / Max. Output Voltage | V | 48/54.6±0.2 | ||
| 24 | Max. Rated Output Current | A | 20 | ||
| 25 | Max. Rated Output Power | W | 1500 | ||
| 26 | Transition Current for Indicator Light | / | 5%~8% Constant Current Value | ||
| 27 | Dimensions (L/W/H) | mm | 535*480*500 | ||
Standard Configuration of AML Series Robotic Workstation
| Standard Configuration | |||||
| Serial number | Name | Model/Specifications | Quantity | Explanation | Distinguishing feature |
| 1 | Industrial collaborative robots | HSR-CR612-1500 | 1 | Standard configuration | HSR-CR616-1200 |
| 2 | Teach Pendant | HSR-PAD | 1 | Standard configuration | |
| 3 | AMR Platform | EMMA400L | 1 | Standard configuration | |
| 4 | Fleet Management System (FMS) Software | CLOUDIA | 1 | Standard configuration | |
| 5 | Auto-docking Charging Station | Custom-designed | 1 | Standard configuration | |
| 6 | Touchscreen HMI | 7-inch | 1 | Standard configuration | |
| 7 | Electric Gripper | Custom-designed based on workpiece dimensions | 1 | Standard configuration | |
| 8 | Vision System | Custom-designed | 1 | Standard configuration | |
| 9 | Server | DELL-T550 | 1 | Standard configuration | |
Related Products

Contact Information
- China Special Aircraft Research Institute,West tower,Av.Guanggu 50, East-Lake High Tech Development Zone,Wuhan,Hubei,P.R.China

{kind=link}
{kind=link}