
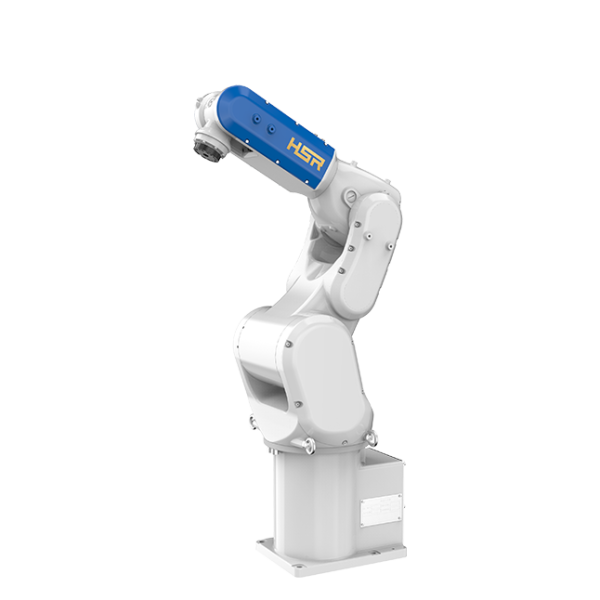
6-axis Industrial Joint Robot JR630 Introduction
The JR630-1800 is designed with high precision. Through-hole structural optimization, it adopts advanced control system and servo drive, features with high accuracy, good acceleration, large movement range and high-rigidity, which makes it easily handle with the manufacture processing, assembly and welding etc.
6-axis Joint Robot Technology Features:
A 6-axis industrial joint robot with 1.8m reach and 30kg payload, featuring large hollow arms (Ø45mm forearm / Ø50mm wrist) for tool cabling, IP67 protection, and high-speed precision for welding/grinding applications.
High Acceleration Performance
By adopting a low-ratio, high-precision reducer, the 6 axis industrial joint robot delivers ultra-fast acceleration, reaching full speed in as little as 0.3 s.
High Rigidity
Structural optimization, a high-power motor and premium materials give the robot exceptional rigidity.
High Precision
In addition to meticulous design, the joint robot uses a domestic high-precision reducer to achieve an end-effector repeatability of ±0.05 mm.
High Payload
With a maximum end-effector payload of 30 kg, the 6 axis joint robot easily handles palletizing, assembly, grinding and welding applications.
High Smoothness
Advanced control and servo drive systems enable the 6 axis robot to execute high-speed yet smooth motions with virtually zero dwell time at transition points.
High Integration
Signal cables and air hoses are routed inside the body for plug-and-play operation. No external wiring is required, and the absence of sliding internal cables keeps the 6 axis industrial joint robot running trouble-free for years.
Long Service Life
The domestic high-precision, high-stiffness reducer ensures the joint robot can operate for decades—one investment, many years of benefit.
High Cost-Effectiveness
This low-cost 6 axis robot can be reprogrammed for palletizing, handling, assembly, grinding, welding and more, significantly reducing labor costs.
JR630 Technical Parameter
| Product model | JR630 | |
| Degree of freedom | 6 | |
| Payload | 30Kg | |
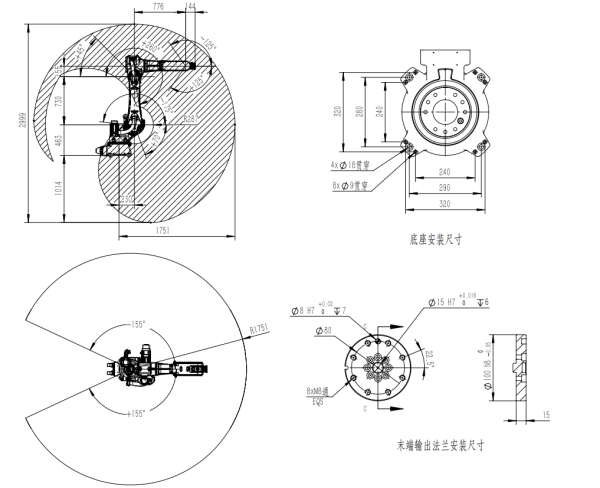
| Maximum operate radius | 1751mm | |
| Repeat positioning accuracy | ±0.05mm | |
| J1 | ±155° | |
| J2 | -175°/+70° | |
| Range of motion | J3 | +45°/+260° |
| J4 | ±360° | |
| J5 | ±125° | |
| J6 | ±360° | |
| J1 | 233°/s, 4.06rad/s | |
| J2 | 141°/s, 2.46rad/s | |
| J3 | 248°/s, 4.33rad/s | |
| J4 | 356°/s, 6.22rad/s | |
| J5 | 386°/s,6.74rad/s | |
| J6 | 487°/s,8.5rad/s | |
| Maximum speed | J6 | 1.3㎏㎡ |
| J5 | 3.92㎏㎡ | |
| J4 | 3.92㎏㎡ | |
| Allowable ptorque | J6 | 45Nm |
| J5 | 84.8Nm | |
| J4 | 84.8Nm | |
| Applicable environment | Temp | 0°C~45°C |
| Humidity | 20%~80% | |
| Other | Avoid contact with inflammable or corrosive gas and | |
| liquid, Stay away from electronic noise(plasma) | ||
| Teach pendant cable length | 8m | |
| Machine- Power box connect cable length |
6m | |
| I/O parameters | Pins:32Pin input(NPN),30Pin output(NPN); | |
| Body Reserved Signal Line | 24Pin(aviation plug) | |
| Pneumatic tube | 2*Φ8 | |
| Battery capacity | 6.5kVA | |
| Rated power / Voltage / Current | 5.2kW/3 Phases 380V/10A | |
| Body/Electric Cabinet | IP54/IP53 | |
| Protection Level | ||
| Installation method | Ground,Side mount,Upside down | |
| Machine/power box weight | 280kg/66kg | |
6-axis Industrial Joint Robot JR630 Workspace diagram
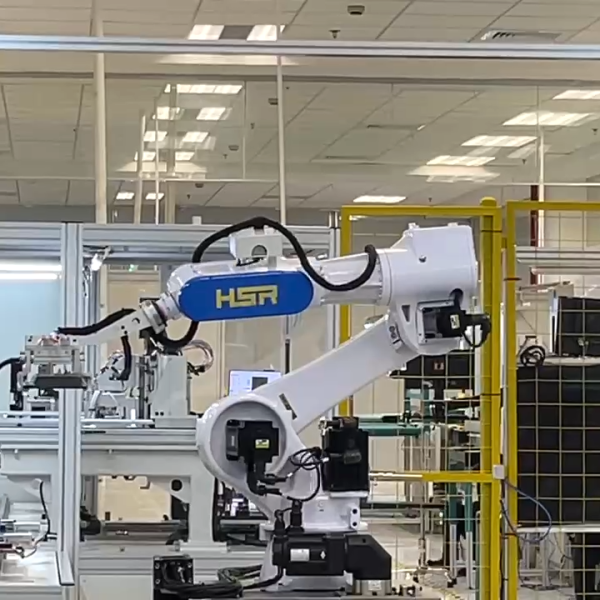
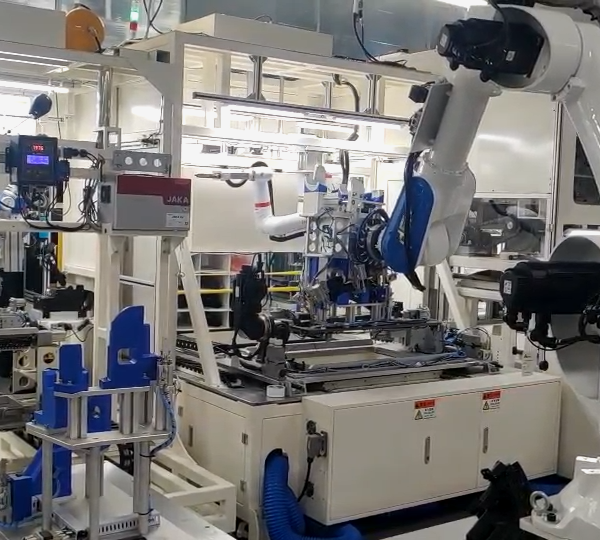
6 axis Joint Robot JR630 Application
JR630 is easily handle with the manufacture processing, assembly and welding etc.

Related Videos
Related Products





Contact Information
- China Special Aircraft Research Institute,West tower,Av.Guanggu 50, East-Lake High Tech Development Zone,Wuhan,Hubei,P.R.China

{kind=link}
{kind=link}