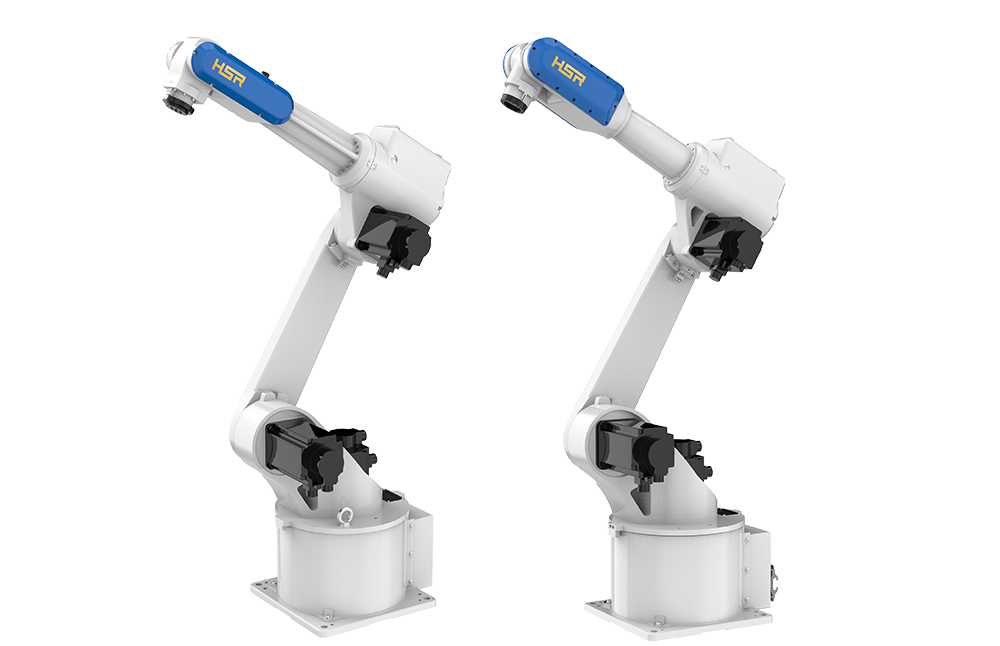
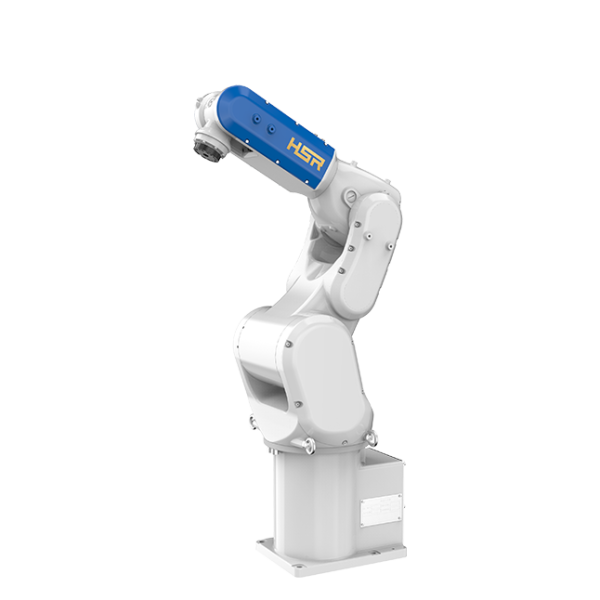
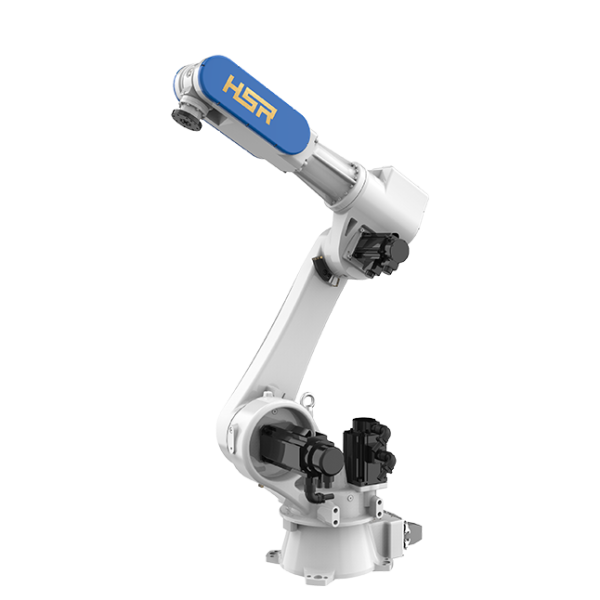
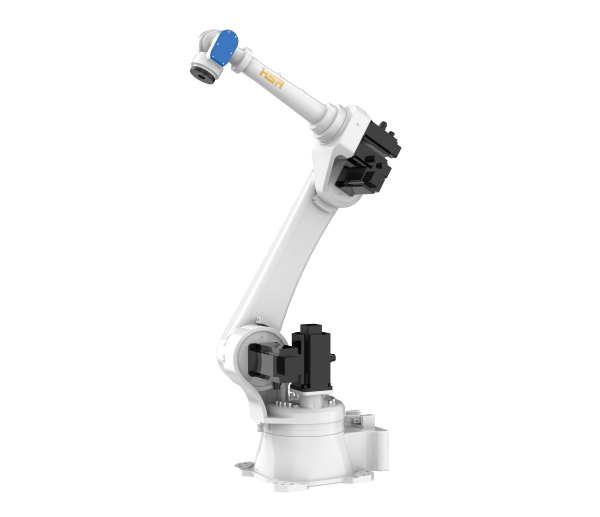
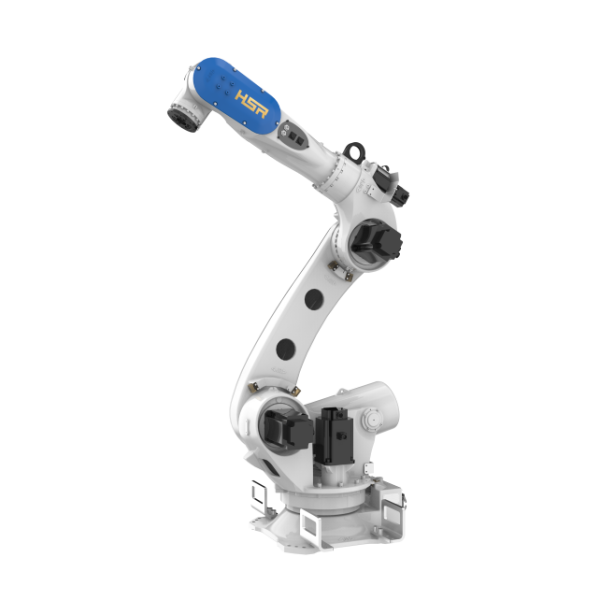
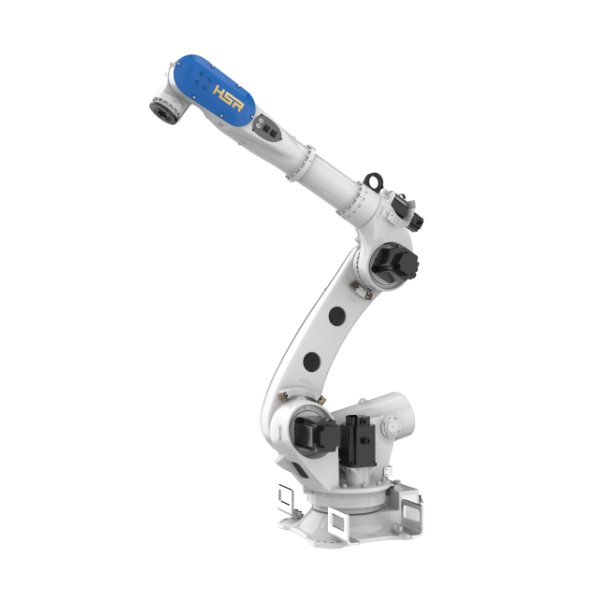
6-axis Industrial Joint Robot JR612
The HSR-JR612 adopts high rigidity arm, advanced servo, fast moving speed, and its re-positioning accuracy can be up to ±0.06mm while the motion radius is 1555mm.
![]() Number of Axes:6
Number of Axes:6
![]() Payload:12Kg
Payload:12Kg
![]() Arm Span:1555mm
Arm Span:1555mm
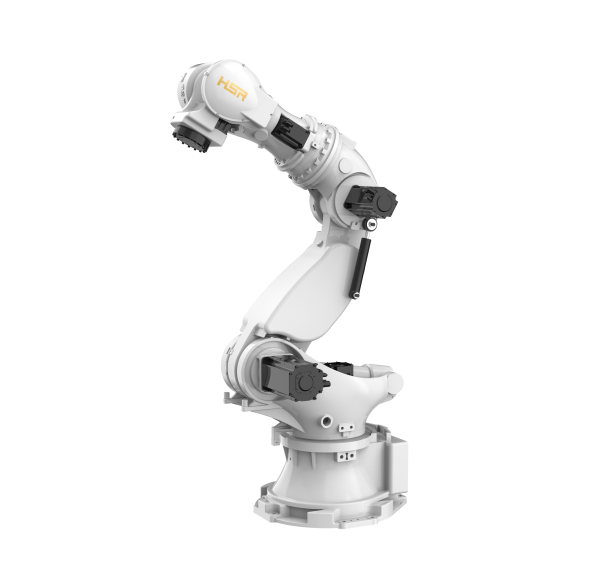
6-axis Industrial Joint Robot JR612 Introduction
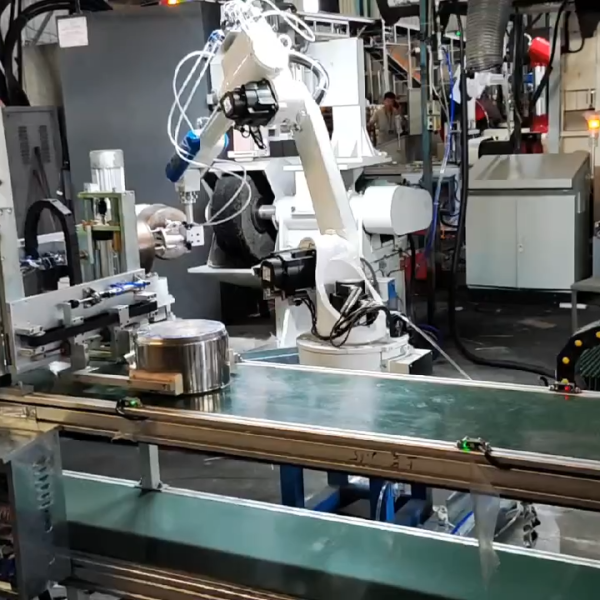
The JR612-1600 is a high performance universal small load joint robot. Thanks to the high rigid arm, independently developed high performance servo motor and control technology, it can realize the bigger arm stretching and bigger load compared to other robots of the same level. It has features such as high movement speed, high repeated positioning accuracy, which is especially suitable for polishing, handling and welding etc.
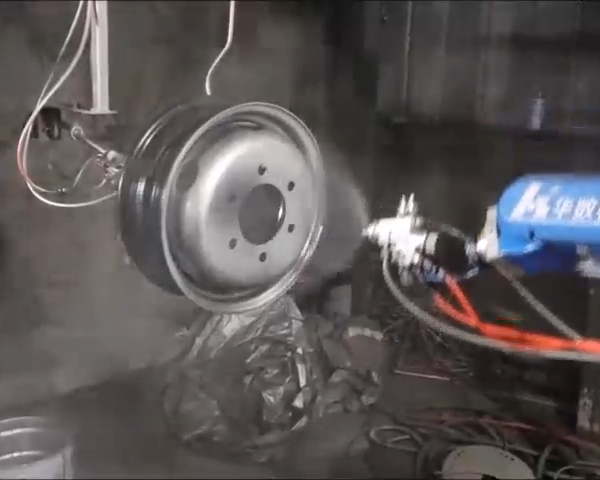
In order to solve the problem in 3C device (electronic de vice) polishing that the conventional robots can’t adapt to the repeated impact with big load, dusty (dry grinding) and humid (water grinding) environment, and create continuous and stable production capacity for customers, Huashu HSR-JR612-1600/DM was born. This model is specifically optimized for the grinding process, bringing the perfect 3C grinding solution for you.
6-axis Joint Robot Advantages:
I. High Performance
-
Precision Engineering
-
±0.02mm trajectory accuracy via laser calibration (ISO 9283)
-
6-axis industrial joint robot with 12kg payload & 1555mm reach
-
-
Core Components
-
Imported high-precision reducers (backlash ≤1 arcmin)
-
High-torque servo motors (300% overload capacity)
-
-
Quality Assurance
-
7×24hr factory stability test before shipment
-
II. Ease of Use
-
Integrated Wiring
-
Built-in servo power/encoder cables + DB15/φ8 pneumatic connectors
-
-
Hollow Wrist Design
-
4-axis through-arm routing (avoiding external tubing exposure)
-
III. Cost-Effective
-
Flexible Configuration
-
IP54/IP67 options for electronics industry
-
-
Reliable Ecosystem
-
Certified core components + vision system integration support
-
JR612 Joint Robot Parameter
| Product model | JR612-1600 | JR612-1600/DM | |
| Degree of freedom | 6 | 6 | |
| Payload | 12kg | 12kg | |
| Maximum operate radius | 1555mm | 1555mm | |
| Repeat positioning accuracy | ±0.06mm | ±0.06mm | |
| J1 | ±168° | ±168° | |
| J2 | -170°/+75° | -170°/+75° | |
| Range of motion | J3 | +40°/ +265° | +40°/ +265° |
| J4 | ±180° | ±180° | |
| J5 | ±108° | ±118° | |
| J6 | ±360° | ±360° | |
| J1 | 197°/s,3.44rad/s | 197°/s,3.44rad/s | |
| J2 | 197°/s,3.44rad/s | 197°/s,3.44rad/s | |
| Maximum speed | J3 | 197°/s,3.44rad/s | 197°/s,3.44rad/s |
| J4 | 600°/s,10.47rad/s | 600°/s,10.47rad/s | |
| J5 | 375°/s,6.54rad/s | 375°/s,6.54rad/s | |
| J6 | 600°/s,10.47rad/s | 375°/s,6.54rad/s | |
| Allowable moment of inertia | J6 | 0.17kg㎡ | 0.17kg㎡ |
| J5 | 1.2kgm² | 1.2kgm² | |
| J4 | 1.2kgm² | 1.2kgm² | |
| J6 | 15Nm | 15Nm | |
| Allowable ptorque | J5 | 35Nm | 35Nm |
| J4 | 35Nm | 35Nm | |
| Applicable | Temp | 0~45°C | 0~45°C |
| environment | Humidity | 20%~80% | 20%~80% |
| Other | Avoid contact with inflammable or corrosive gas and liquid, Stay away from electronic noise(plasma) | Avoid contact with inflammable or corrosive gas and liquid, Stay away from electronic noise(plasma) | |
| Teach pendant cable length | 8m | 8m | |
| Machine-Power box connect cable length | 6m | 6m | |
| I/O parameters | Pins:32Pin input,31Pin output | Pins:32Pin input,31Pin output | |
| Body Reserved Signal Line | 12Pin(solder connnected avaition plug) | 12Pin(solder connnected avaition plug) | |
| Pneumatic tube | 1*Φ8 | – | |
| Battery capacity | 4.5kVA | 4.5kVA | |
| Rated power / Voltage / Current | 3.5kW/3 Phases AC380V/6.7A | 3.5kW/3 Phases AC380V/6.7A | |
| Body/Electric Cabinet | IP54(robot arm IP65)/IP54 | IP54(robot arm IP67)/IP54 | |
| Installation method | Ground,Upside down, Side mount, Install in any direction | Ground | |
| Machine/power box weight | 196kg/56kg | 215kg/56kg | |
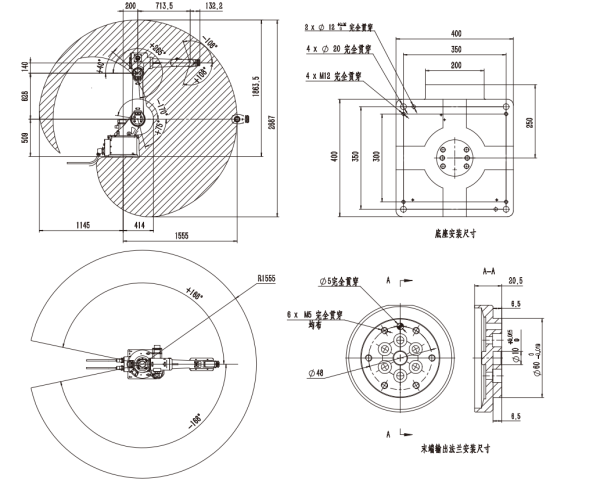
6-axis Industrial Joint Robot JR612-1600/DM Workspace diagram
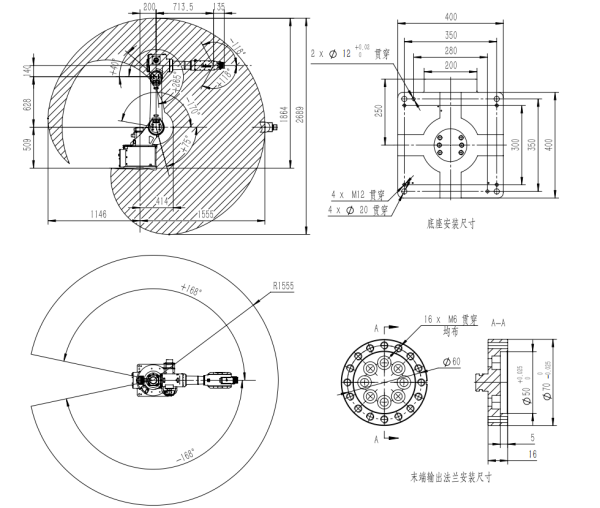
6-axis Industrial Joint Robot JR612-1600 Workspace diagram
6 axis Joint Robot JR612 Application
JR612 is suitable for polishing, handling and 3C industries.


Other Videos
Related Products





Contact Information
- China Special Aircraft Research Institute,West tower,Av.Guanggu 50, East-Lake High Tech Development Zone,Wuhan,Hubei,P.R.China

{kind=link}
{kind=link}