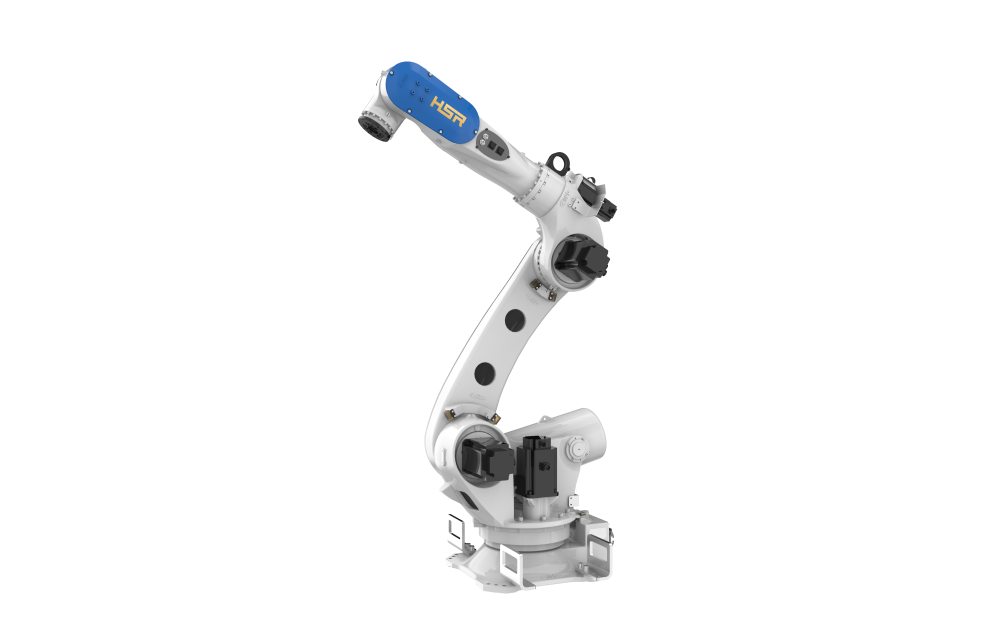
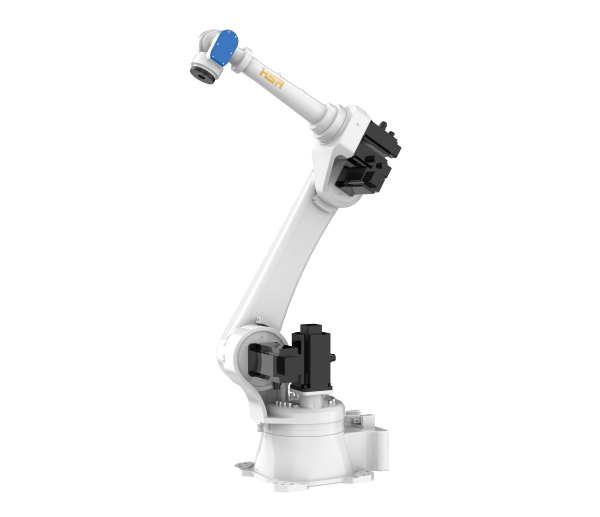
6-axis Industrial Joint Robot JR6210 Introduction
JR6210 is 210kg load, repeated positioning accuracy ±0.07mm, with Wasu self-developed third generation control system, strong load capacity, widely used in machine tools loading and unloading, material handling, welding and other occasions.
Simplified maintenance
The robot was designed with increased maintainability in mind as a factor in improving the total cost of ownership, so the modular design of the robot reduces after-sales and repair time.
Flexible and open
Control system independent research and development, controllable, support multi-sensor access, a variety of industrial bus; Support dynamic library embedded loading custom module, process package integration custom development.
6-axis Joint Robot Parameter:
| Product model | HSR-JR6210 | |
| Degree of freedom | 6 | |
| Payload | 210kg | |
| Maximum operate radius | 2700mm | |
| Repeat positioning accuracy | ±0.05mm | |
| J1 | ±180° | |
| J2 | -13°/-152° | |
| Range of motion | J3 | +6°/ +260° |
| J4 | ±180° | |
| J5 | ±120° | |
| J6 | ±360° | |
| J1 | 125°/s,2.18rad/s | |
| J2 | 115°/s,2.01rad/s | |
| J3 | 115°/s,2.01rad/s | |
| J4 | 155°/s,2.71rad/s | |
| Maximum speed | J5 | 160°/s,2.79rad/s |
| J6 | 220°/s,3.84rad/s | |
| J6 | 137.78kg㎡ | |
| J5 | 190.15kg㎡ | |
| J4 | 190.15kg㎡ | |
| J6 | 735Nm | |
| Allowable moment of inertia | J5 | 1365Nm |
| J4 | 1365Nm | |
| Temp | 0°C~45°C | |
| Humidity | 20%~80% | |
| Allowable ptorque | Other | Av)oid contact with inflammable or corrosive gas |
| Stay away from eleliquidctronic noise(plasma | ||
| Teach pendant cable length | 8m | |
| Machine- Power box connect cable length |
8m | |
| I/O parameters | Pins:32Pin input(NPN),30Pin output(NPN) ; | |
| Body Reserved Signal Line | 42Pin(solder connnected avaition plug) | |
| Pneumatic tube | 2*Φ12 | |
| Battery capacity | 18.5kVA | |
| Rated power / Voltage / Current Body/Electric Cabinet | 15kW/3 phase AC380V/25A | |
| Protection Level | IP54/IP54 | |
| Installation method | Ground | |
| Machine/power box weight | 1150kg/150kg |
Joint Robot JR6210 Workspace diagram

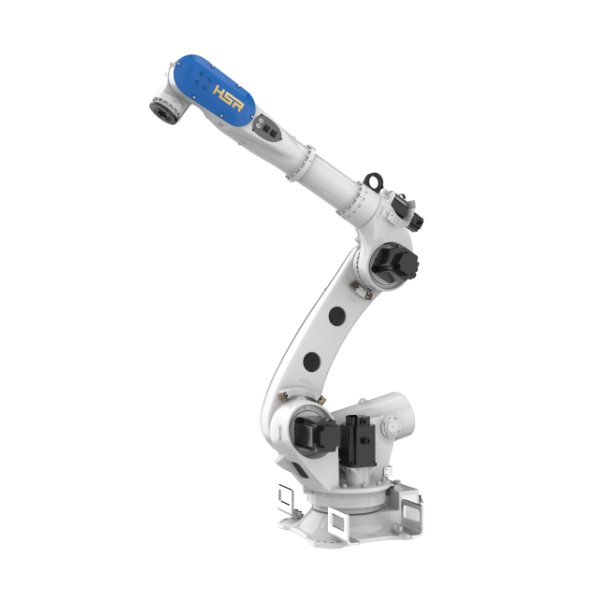
6 axis Industrial Joint Robot JR6210 Application
It can be applied in multiple scenarios such as handling, palletizing, spot welding, and grinding.


Related Videos
Related Products





Contact Information
- China Special Aircraft Research Institute,West tower,Av.Guanggu 50, East-Lake High Tech Development Zone,Wuhan,Hubei,P.R.China

{kind=link}
{kind=link}