Offline Programming and Simulation
InteRobot offline programming software supports various brands and models of industrial robots at home and abroad, such as Huasu, ABB, KUKA, Yaskawa, Kawasaki, etc. It has basic offline programming functions such as robot library management, tool library management, processing method selection, processing path planning, kinematic solution, robot selection, control parameter setting, anti-collision and interference inspection, kinematic simulation, etc. Its feature is the deep integration with the process knowledge in the application field, which can solve the urgent problems of expanding robot application fields and increasing task complexity. It can be widely used in professional fields such as 3C product metal parts, aerospace parts, automotive covers, laser welding and cutting, mold manufacturing, hardware parts, spraying, multi-axis processing, stone and plate processing.
Main functions and features
-
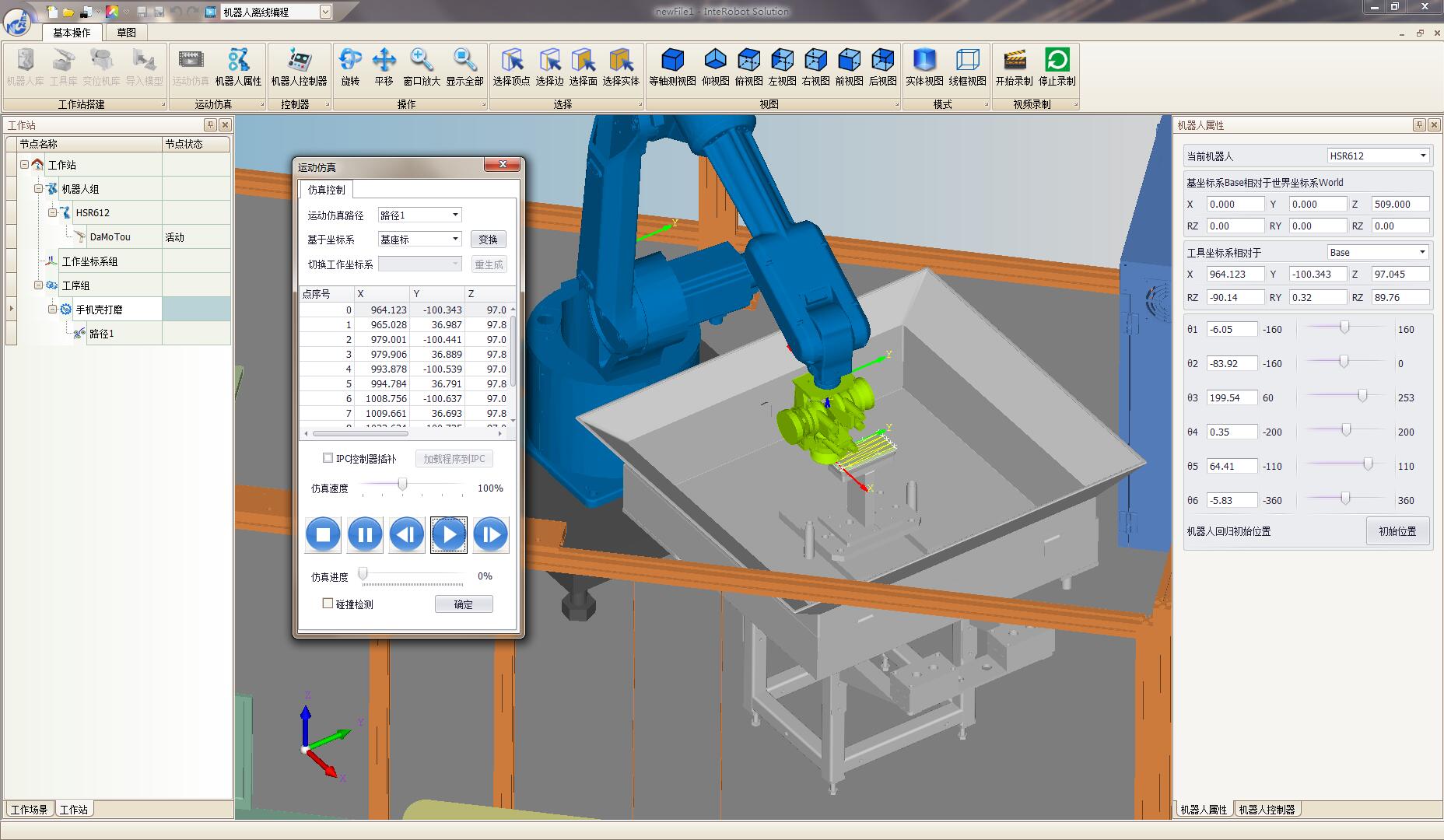
Fast programming, precise implementation
Compared with traditional manual teaching programming, InteRobot offline programming software is directly programmed and simulated for 3D models. It directly calibrates robots and work scenes in a computer virtual environment, and plans robot processing paths through a variety of trajectory planning methods developed. After virtual simulation and collision interference inspection, the output program can be directly run in the actual industrial robot. The whole process is completed on an office computer without interrupting production. The programming is fast, accurate, and has no safety hazards.
-
Support for multi-brand industrial robots
Supports domestic and foreign mainstream brand robots, such as Huasu, ABB, KUKA, Yaskawa, Kawasaki and other brands. The robot library has provided a series of model robots and also supports customization. Users can expand any model of robot.
-
Professional process software package
Offline programming software deeply integrates field process knowledge, and can provide professional process parameter settings and related trajectory programming methods for industries such as grinding, welding, and spraying, and can adaptively generate robot programs containing process characteristics.
-
Rich trajectory planning methods
Trajectory planning provides manual, automatic, external and other methods, which can adapt to the programming habits of domestic personnel in various industries. The trajectory program planned by offline programming can also support multi-external axis linkage control, including single-side positioner, double-positioner and mixed control.
-
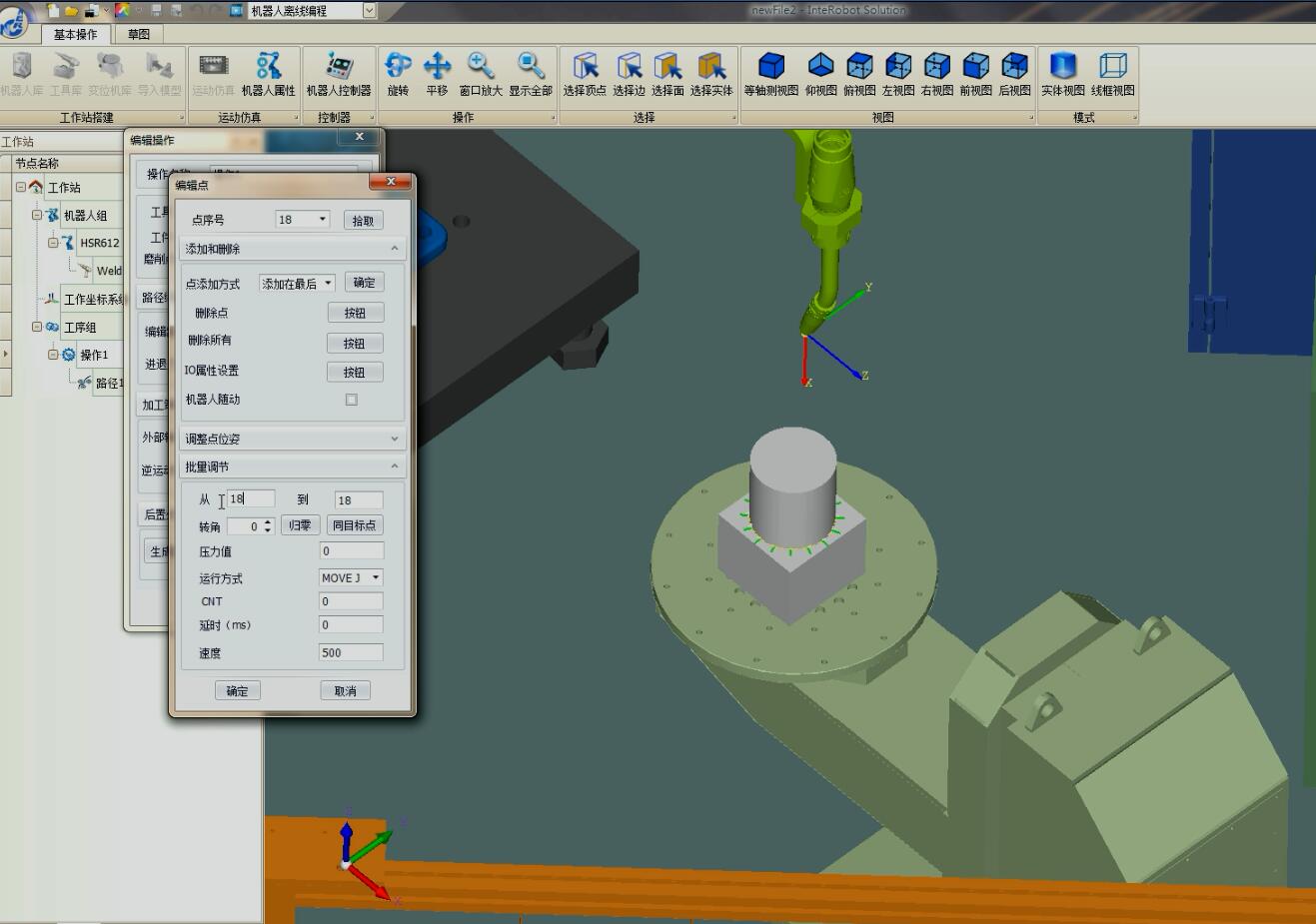
Efficient program point verification and adjustment method
Offline programming software is inevitable in real industrial application projects, such as grinding, welding, spraying and other actual projects. Based on a lot of practical application experience, InteRobot has developed a series of functions such as robot point tracking, frame selection batch deletion, Cartesian coordinate batch adjustment, position orientation offset, etc., which can efficiently verify and adjust program points that do not meet the requirements.
-
Intelligent trajectory optimization method
InteRobot offline programming software provides trajectory intelligent analysis tools, which can identify the characteristic lines and characteristic points on the workpiece surface according to the changes in the processing trajectory and process requirements, and then realize the speed and acceleration planning of the robot program. For Wasu robots, advanced transition parameters such as CP, SP, and AI can also be set.
-
Continuous technical support can be provided
Genuine software, with completely domestic independent intellectual property rights, can provide continuous technical support.
Related Products
Contact Information
- China Special Aircraft Research Institute,West tower,Av.Guanggu 50, East-Lake High Tech Development Zone,Wuhan,Hubei,P.R.China

{kind=link}
{kind=link}